PSI Joliot-Curie/ Chateaubriand - Page de Synthèse
Contenu :
Q1 - Les performances d'un asservissement
Résultat
Enoncé
Quelles sont les performances évaluées lors de l'étude d'un SLCI ?
Correction
Explications
Le comportement d'un système asservi peut être évalué selon 3 performances :
• La rapidité : aptitude à atteindre en sortie une réponse continument comprise, par exemple, entre 95% et 105% de la valeur finale,
• La stabilité : aptitude à atteindre en sortie une réponse bornée pour une entrée bornée,
• La précision : aptitude à atteindre en sortie une réponse proche de celle attendue.
A noter qu'au critère de stabilité, on peut associer l'amortissement, aptitude à atteindre une réponse finale sans dépassement "excessif" de celle-ci lors de la phase transitoire.
Q2 - Les performances d'un asservissement
Résultat
Enoncé
Quelle performance doit être évaluée dans un premier temps ?
Correction
Explications
Avant d'étudier les performances de rapidité et de précision, il faut d'abord s'assurer que le système est stable. Si le système est instable, ces deux critères ne peuvent être évalués.
Q3 - Système asservi et boucle retour
Résultat
Enoncé
Il y a forcément une boucle retour dans le schéma bloc représentant un système asservi
Correction
Q4 - Système asservi et boucle retour
Résultat
Enoncé
Un système modélisable par un schéma bloc présentant une boucle retour est forcément asservi
Correction
Explications
Contre exemple : Le modèle d'un moteur à courant continu présente une boucle retour et n'est pourtant pas asservi.
Un système asservi doit comporter une boucle retour, mais la présence d'une boucle retour n'implique pas systématiquement que le système est asservi.
Q5 - Stabilité d'un système asservi - Lieu des pôles
Résultat
Enoncé
Un SLCI, de FTBF H(p) est stable si et seulement si :
Correction
Q6 - Stabilité d'un système asservi
Soient plusieurs systèmes asservis modélisables par les fonctions de transfert en boucle fermée suivantes. Statuez sur la stabilité de ces systèmes.
Plus d'éléments à catégoriser | Stable Déposez ici Solution
Instable Déposez ici Solution
|
Un système est stable si sa fonction de transfert (en BF) ne présente aucun pôle à partie réelle positive ou nulle.
Les systèmes modélisables par une FT du premier ordre s'écrivant sous la forme ou du second ordre s'écrivant sous la forme
ou du second ordre s'écrivant sous la forme  sont forcément stables.
sont forcément stables.
Q7 - Stabilité d'un système asservi
Soient plusieurs systèmes asservis à retour unitaire modélisables par les fonctions de transfert en boucle ouverte suivantes. Statuez sur la stabilité de ces systèmes.
Plus d'éléments à catégoriser | Stable Déposez ici Solution
Instable Déposez ici Solution
A la limite de stabilité Déposez ici Solution |
Puisque les fonctions de transferts données sont des fonctions de transfert en BO, on peut employer deux méthodes pour conclure sur la stabilité.
1 / En analysant la FTBO, en déterminant les marges de phase et de gain :
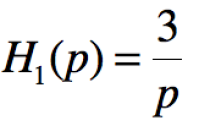
H1(p) est un premier ordre => la marge de phase est supérieure à 90° et la marge de gain infinie => le système bouclé est stable
H2(p) est un intégrateur => la marge de phase est de 90° et la marge de gain infinie => le système bouclé est stable
2/ En exprimant la FTBF, puis en déterminant les lieux des pôles ou en analysant les signes des coefficients du dénominateur :
 => Cette FTBF est un premier ordre, le pôle est bien à partie réelle strictement négative => le système bouclé est stable
=> Cette FTBF est un premier ordre, le pôle est bien à partie réelle strictement négative => le système bouclé est stable => Tous les coefficients du dénominateur de cette FTBF ne sont pas de même signe => le système bouclé est instable
=> Tous les coefficients du dénominateur de cette FTBF ne sont pas de même signe => le système bouclé est instable => Un des coefficients du dénominateur de cette FTBF est nul => le système bouclé est instable. On peut aussi constater que la FTBF est un intégrateur : la sortie ne sera pas bornée pour une entrée bornée = > le système bouclé est instable.
=> Un des coefficients du dénominateur de cette FTBF est nul => le système bouclé est instable. On peut aussi constater que la FTBF est un intégrateur : la sortie ne sera pas bornée pour une entrée bornée = > le système bouclé est instable.



Q8 - Stabilité d'un système asservi - Analyse diagrammes de Bode
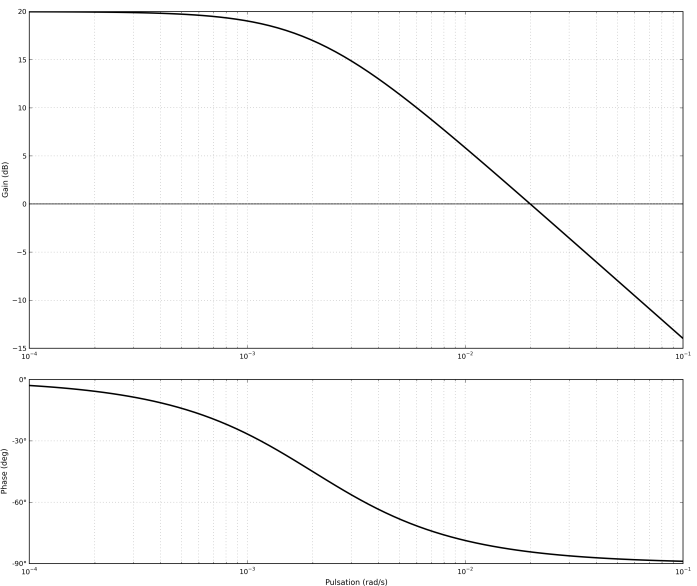
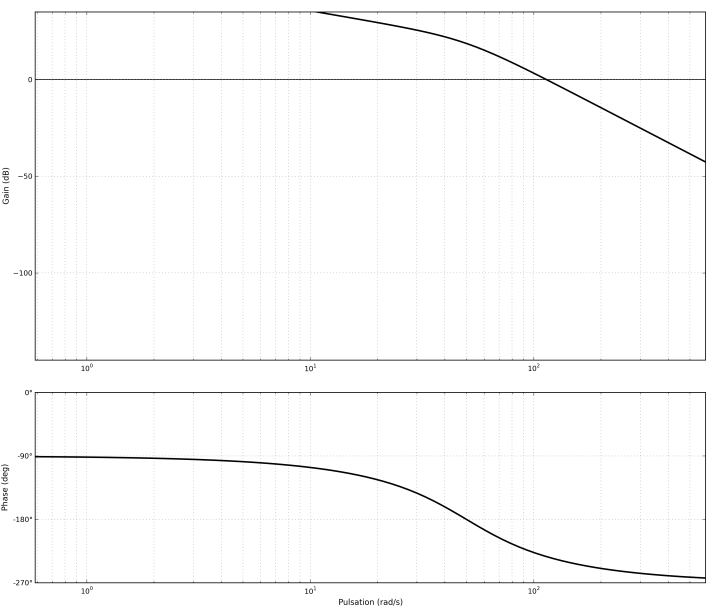
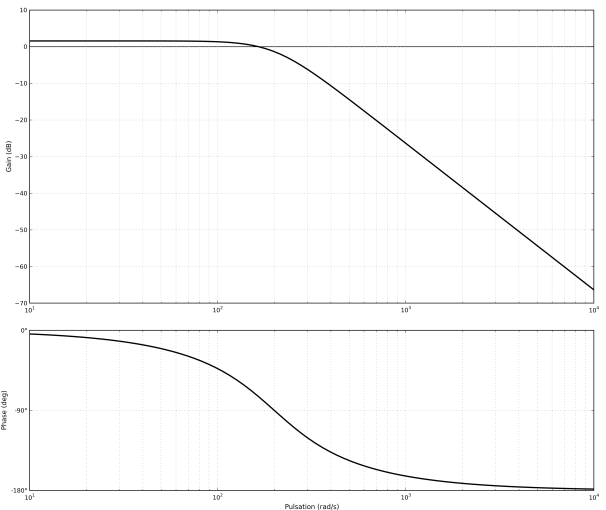
Voici les diagrammes de Bode des fonctions de transfert boucle ouverte de différents systèmes asservis. Statuez sur la stabilité de ces systèmes (cliquez sur les images pour les agrandir).
Plus d'éléments à catégoriser | Stable Déposez ici Solution
Instable Déposez ici Solution
|
Q9 - Stabilité d'un système asservi - Marge de gain
Voici les diagrammes de Bode des fonctions de transfert boucle ouverte de différents systèmes asservis. Associez diagrammes et marge de gain (cliquez sur les images pour les agrandir).
Plus d'éléments à catégoriser | Marge de gain comprise entre -50dB et 0dB Déposez ici Solution
Marge de gain comprise entre 0dB et 50dB Déposez ici Solution
Marge de gain supérieure à 50dB Déposez ici Solution
|
Q10 - Stabilité d'un système asservi - Marge de phase
Voici les diagrammes de Bode des fonctions de transfert boucle ouverte de différents systèmes asservis. Associez diagrammes et marges de phase (cliquez sur les images pour les agrandir).
Plus d'éléments à catégoriser | Marge de phase comprise entre -90° et 0° Déposez ici Solution
Marge de phase comprise entre 0 et 90° Déposez ici Solution
Marge de phase supérieure à 90° Déposez ici Solution
|
Q11 - Rapidité
Résultat
Enoncé
On peut utiliser les critères suivants pour caractériser la rapidité d'un asservissement :
Correction
Explications
Pour un système asservi, le temps de réponse n'est défini qu'en boucle fermée.
Concernant la bande passante, on montre que :
- plus la bande passante à 0dB de la FTBO est grande, plus la bande passante à -3dB de la FTBF est grande ;
- dans le cas où KBO>>1, la bande passante à -3dB d'un système en boucle fermée peut être approchée par la bande passante à 0dB de sa FTBO.
Q12 - Tr 5 % pour un premier ordre
Résultat
Enoncé
Pour un premier ordre, de fonction de transfert  :
:
Correction
Q13 - Pôle dominant
Résultat
Enoncé
On peut approcher la fonction de transfert suivante par :
par :
Correction
Explications
Un pôle dominant est un pôle proche de l'axe des imaginaires, dont la participation à la réponse temporelle est prépondérante relativement aux autres pôles.
Cette observation permet, sur des fonctions de transfert d'ordre élevé ( en pratique >2), d'effectuer des approximations en négligeant la participation des pôles rapides. Ces approximations seront très utiles par exemple pour déterminer une valeur approchée de la rapidité d'un système d'ordre élevé, en l'approximant par un système d'ordre 1 ou 2.
Q14 - Pôle dominant et temps de réponse
Résultat
Enoncé
Le temps de réponse à 5% d'une FTBF d'ordre 3 présentant les pôles p1=-2, p2=-12+5j et p3=-12-5j est d'environ 1,5 s, car -2 est le pôle dominant.
Correction
Explications
Le pôle dominant est -2, le plus proche de l'axe imaginaire. Sa participation à la réponse temporelle est prépondérante. On peut alors approximer la FTBF par K/(p+2)=KBF/(1+0,5p), soit une constante de temps de 0,5s et un temps de réponse de 1,5s.
Q15 - Bande passante et rapidité
Résultat
Enoncé
Plus la bande passante à -3dB est élevée, plus le système est lent.
Correction
Q16 - Expression de l'erreur
Résultat
Enoncé
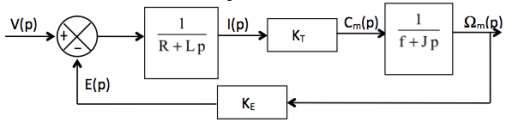
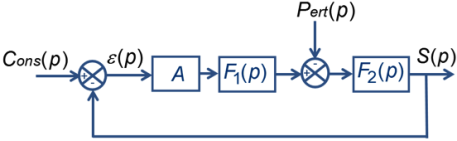
Donner l'expression de l'erreur correspondant au schéma bloc ci-dessous :
Correction
Q17 - Expression de l'erreur
Résultat
Enoncé
Donner l'expression de l'erreur correspondant au schéma bloc ci-dessous :

Correction
Q18 - Régulation et poursuite
Résultat
Enoncé
Soit le système asservi représenté par le schéma bloc ci-dessous :
On suppose que la consigne est constante et que la perturbation varie.
Dans ce cas, on dit que le système est utilisé en :
Correction
Explications
Un système en boucle fermée peut être utilisé en régulation ou en poursuite. L'asservissement est utilisé en régulation si la consigne est constante. L'objectif est donc de maintenir la sortie constante malgré la présence des perturbations. Si, par contre, la consigne varie, l'asservissement est utilisé en poursuite. Le but est alors que la sortie suive la consigne.
Dans les deux cas, l'objectif est donc que la sortie soit égale à la consigne.
En pratique, un système est rarement employé uniquement en poursuite ou en régulation. En effet, dans le cas de systèmes régulés, il faut parfois changer la valeur de la consigne d'une valeur constante à une autre. Durant ce changement, le système effectue une poursuite. Lorsqu'un asservissement est dans un contexte de poursuite, les perturbations continuent d'influencer le procédé et par conséquent, il faut éliminer les effets (donc régulation en même temps que poursuite).
Q19 - Terme de l'erreur lié à la consigne
Résultat
Enoncé
Soit un système asservi soumis à une consigne Cons(p) et à une perturbation Pert(p)
Le terme de l'erreur qui dépend de la consigne a pour expression :
Correction
Q20 - Terme de l'erreur lié à la perturbation
Résultat
Enoncé
Soit un système asservi soumis à une consigne Cons(p) et à une perturbation Pert(p)
Le terme de l'erreur qui dépend de la perturbation a pour expression :
Correction
Q21 - Classe d'une fonction de transfert
Associez à chaque fonction de transfert la classe correspondante.
Plus d'éléments à catégoriser | FT de classe 0 Déposez ici Solution
FT de classe 1 Déposez ici Solution
FT de classe 2 Déposez ici Solution
|
Q22 - Erreur statique de poursuite pour une consigne de type échelon
Soit un système asservi, utilisé en poursuite avec Pert(p)=0,
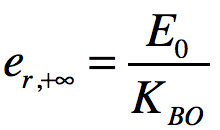
Associez à chaque classe de FTBO l'expression de l'erreur en régime permanent correspondant à une consigne de type échelon, de valeur E0.
Pensez à déposer toutes les propositions inutilisées dans la poubelle avant de valider.
Plus d'éléments à catégoriser | Poubelle Déposez ici Solution
FTBO de classe 0 Déposez ici Solution
FTBO de classe >=1 Déposez ici Solution
|

Q23 - Erreur statique de poursuite pour une consigne de type rampe
Soit un système asservi, utilisé en poursuite avec Pert(p)=0,
Associez à chaque classe de FTBO l'expression de l'erreur correspondant à une consigne de type rampe, de pente a.
Pensez à déposer toutes les propositions inutilisées dans la poubelle avant de valider.
Plus d'éléments à catégoriser | Poubelle Déposez ici Solution
FTBO de classe 0 Déposez ici Solution
FTBO de classe 1 Déposez ici Solution
FTBO de classe 2 Déposez ici Solution
|

Q24 - Précision d'un système asservi
Résultat
Enoncé
Un système est d'autant plus précis que :
Correction
Q25 - Précision et présence d'intégrateur dans la BO
Résultat
Enoncé
Soit un système asservi, non soumis à une perturbation. S'il présente au moins une intégration dans la boucle ouverte, alors l'erreur statique en réponse à un échelon est nulle.
Correction
Q26- Précision et présence d'intégrateur dans la BO
Résultat
Enoncé
Soit un système asservi, soumis à une perturbation. L'erreur statique sera nulle pour une entrée et une perturbation en échelon si l'intégration dans la FTBO est située en aval de la perturbation.
Correction
Q27 - Stabilité en poursuite et en régulation
Résultat
Enoncé
Un système stable en poursuite ne l'est pas forcément en régulation.
Correction
Q28 - Analyse de la FTBO
Résultat
Enoncé
L'analyse de la fonction de transfert en boucle ouverte d'un système asservi permet d'évaluer les performances de :